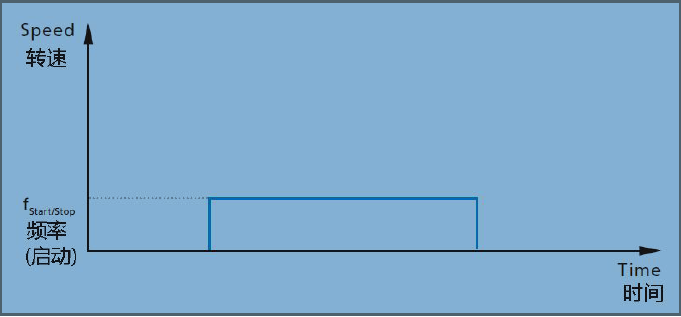
①Bergantung pada jenis profil gerakan, analisisnya berbeza. Operasi Mula-Henti: Dalam mod operasi ini, motor disambungkan pada beban dan beroperasi pada kelajuan malar. Motor perlu memecut beban (mengatasi inersia dan geseran) dalam langkah pertama kepada frekuensi yang diarahkan.
Mod kegagalan:Motor langkahtidak bermula
| Sebab-sebab | Penyelesaian |
| Beban terlalu tinggi | Motor salah, pilih motor yang lebih besar |
| Kekerapan terlalu tinggi | Kurangkan kekerapan |
| Jika motor berayun dari kiri ke kanan, satu fasa mungkin rosak atau tidak bersambung | Ganti atau baiki motor |
| Arus fasa tidak sesuai | Tingkatkan arus fasa, sekurang-kurangnya semasa yang pertama beberapa langkah. |
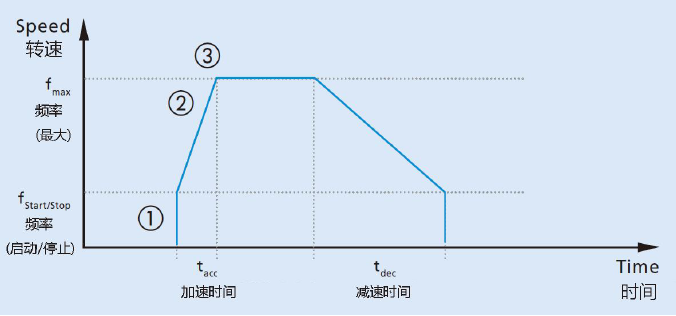
②Mod pecutan: Dalam kes ini,Motor langkahdibenarkan memecut ke frekuensi maksimum dengan kadar pecutan yang dipratetapkan dalam pemacu.
Mod kegagalan: Motor stepper tidak boleh dihidupkan
Atas sebab-sebab danpenyelesaianlihat bahagian ① "Operasi Mula-Henti".
Mod kegagalan: Motor stepper tidak menamatkan tanjakan pecutan.
| Sebab-sebab | Penyelesaian |
| Motor terperangkap dalam frekuensi resonans | ● Tingkatkan pecutan untuk melalui resonansfrekuensi dengan cepat●Pilih frekuensi mula-henti di atas titik resonans●Gunakan langkah separuh atau langkah mikro●Tambah peredam mekanikal yang boleh berbentukcakera inersia pada aci belakang |
| Tetapan voltan atau arus bekalan yang salah (terlalu rendah) | ● Tingkatkan voltan atau arus (dibenarkan untuk menetapkan nilai yang lebih tinggiuntuk tempoh yang singkat)●Uji motor impedans yang lebih rendah●Gunakan pemacu arus malar (jika pemacu voltan malar digunakan) |
| Kelajuan tertinggi terlalu tinggi | ●Kurangkan kelajuan tertinggi●Kurangkan tanjakan pecutan |
| Kualiti tanjakan pecutan yang buruk darielektronik (berlaku dengan tanjakan digital) | ●Cuba dengan pemandu lain |
Mod kegagalan: Motor stepper menamatkan pecutan tetapi terhenti apabila kelajuan malar dicapai.
| Sebab-sebab | Penyelesaian |
| Motor Stepper beroperasi pada had kuasanya keupayaan dan pecutan terhenti akibat pecutan yang terlalu tinggi. Kedudukan keseimbangan telah melebihi had, menyebabkan getaran dan ketidakstabilan rotor. | ● Pilih kadar pecutan yang lebih kecil atau gunakan dua yang berbezatahap pecutan, tinggi pada permulaan, lebih rendah ke arah kelajuan tertinggi●Tingkatkan tork● Tambah peredam mekanikal pada aci belakang. Ambil perhatian bahawaini akan menambah inersia rotor dan mungkin tidak menyelesaikan masalahjika kelajuan tertinggi berada pada had motor. ●Pacu motor menggunakan langkah mikro |
③Peningkatan beban gaji dari semasa ke semasa
Dalam sesetengah kes, motor berjalan seperti biasa untuk jangka masa yang lama tetapi akan hilang langkah selepas beberapa ketika. Dalam kes itu, kemungkinan besar beban yang dilihat oleh motor telah berubah. Ia boleh berpunca daripada haus galas motor atau daripada peristiwa luaran.
Penyelesaian:
● Sahkan kehadiran peristiwa luaran: Adakah mekanisme yang dipacu oleh motor telah berubah?
● Sahkan kehausan galas: Gunakan galas bebola dan bukannya galas lengan sinter untuk jangka hayat motor yang lebih lama.
● Sahkan sama ada suhu ambien telah berubah. Pengaruhnya terhadap kelikatan pelincir galas tidak ketara untuk motor mikro. Gunakan pelincir yang sesuai untuk julat operasi. (Contoh: pelincir mungkin menjadi likat pada suhu yang melampau, atau selepas penggunaan yang berpanjangan, yang akan meningkatkan beban muatan)
Masa siaran: 16 Nov-2022